– Robotane må tilpasse seg oss menneske
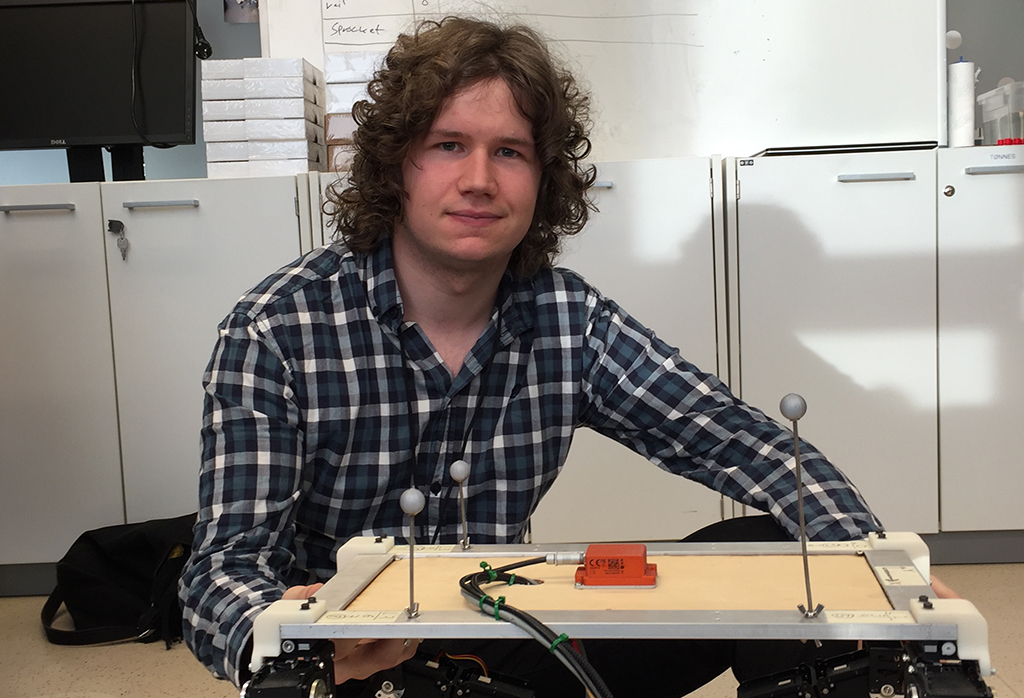
Stipendiat Tønnes Nygaard lærer robotane sine å gå. Det er enklare sagt enn gjort.

Denne artikkelen er eldre enn 1 år gamal. Det betyr at noko av informasjonen kan vere utdatert.
Som masterstudent laga han roboten som har seks like lange bein, men datasystemet foreslo at den mest optimale edderkoppen hadde to lange og fire korte bein.
– Då gjekk eg tilbake til 3D-skrivaren, laga nye delar og sette saman den oppgraderte versjonen av roboten, seier 26-åringen.
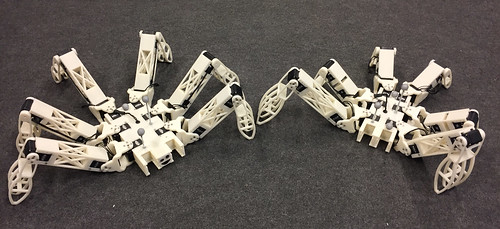
Edderkoppen til venstre har seks like lange bein, og til høgre er edderkoppen som etter evolusjon fekk fire korte og to lange bein.
Tolv kamera i taket og små sølvkuler på roboten gjer at eit datasystem kan måle kor fort han flyttar seg framover. Algoritmane kan deretter foreslå små endringar som gjer at roboten kan gå endå fortare.
Målet med robotane er å utforske korleis maskiner lærer, og er ein del av forskingsprosjektet EPEC (sjå faktaboks). Framtida.no er på besøk på Institutt for informatikk på Universitetet i Oslo for sjå ein robot ta store steg for utviklinga av kunstig intelligens (AI).
LES OGSÅ: Vil definere robotar som personar
Kort frå idé til robot
– 3D-skriving er ein revolusjon for robotikken, seier Nygaard.
Han fortel engasjert om dei titals robotane som forskingsgruppa Robin (robotikk og intelligente system) har laga med eige utstyr. Når ein av forskararne i gruppa får ein ny idé, går det berre nokre dagar før ein ny robot står klar.
– Moderne robotikk handlar om å pushe grensene for materiala for å få til det vi har lyst til å gjere, seier Nygaard.
Evolusjon av ein robot
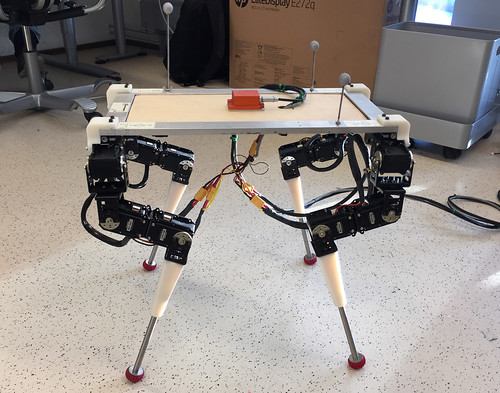
Han viser fram Dyret, ein konstruksjon på storleik med eit lam. Dyret opptek det meste av forskingstida hans, der han nyttar roboten for å lære ein kunstig intelligens å gå.
– Vi har tenkt på å lage ei hinderløype med ulike underlag for Dyret, og kanskje til og med sleppe den ut på graset til sommaren, seier Nygaard.
I staden for å byte ut fysiske delar av roboten, byter Nygaard i staden ut digitale kommandoar for korleis Dyret skal gå. Dette inkluderer kor langt kvart av beina skal flytte seg, kor høgt beina må løftast, og korleis Dyret skal halde balansen. I alle testane er roboten den same, men over tid lærer AI-en å styre beina stadig betre.
– Vi har latt oss inspirere av naturen, og nyttar evolusjon som prinsipp for korleis AI-en lærer, forklarar han.
Prosessen startar med at Nygaard ber systemet om å sette saman heilt tilfeldige måtar å gå på. Ved hjelp av videoovervaking måler han resultatet: Kor lang tid brukar Dyret på å gå éin meter fram og éin meter tilbake?
– Algoritmen bestemmer kven av dei ulike måtane å gå på som er best og som «overlever».
Dyret går nesten som Bambi på isen, men ramlar ikkje.
– Etter at eg har sett kor mykje Dyret strevar med å gå éin meter utan å ramle, så trur ikkje det er særleg sannsynleg at robotane tek over verda med det første, seier Nygaard.
Robotbarna
AI-en vel ut to foreldre, to digitale sett med parametrar for korleis Dyret går. AI-en kombinerer informasjonen frå foreldra for å lage neste generasjon. Truleg vil borna vere litt betre til å gå.
– Når systemet lagar dei nye barna, skjer det også tilfeldige mutasjonar. Dette resulterer i at barna er kombinasjonar av foreldra sine, men med litt nye variasjonar, forklarar Nygaard.
Han vekslar mellom å bruke datasimulering og å la Dyret sjølv teste dei ulike måtane å gå på.
– Med Dyret gjer vi evolusjon over 20 generasjonar, og med simulering kan vi gjere over 500 generasjonar. Endringane vert mindre over tid, og systemet finn det vi kallar for eit lokalt optimum.
LES OGSÅ: To robotar samtalar om kjærleik og syng Adele
Påverkar omgivnadane
Samspelet mellom robotar og menneske vert stadig viktigare, ifølgje Nygaard. Tidlegare var fokuset på den enkelte roboten, og oppgåve den skulle utføre. No vert robotane ein del av kvardagen vår.
– No er det robotane som må tilpasse seg menneska. Då må Dyret lære korleis den påverkar omgivnadane sine, fortel Nygaard.
I tillegg håpar han at fleire robotar skal kunne samarbeide og utveksle informasjon mellom seg. Då må robotane ha ein måte å vurdere kvarandre sin informasjon på. Kven har rett? Er det ein vegg i enden av gangen, eller er det trygt å gå framover med stor fart?
– Korleis får vi robotar til å stole på faktainformasjon frå kvarandre? Vi må la dei prøve og feile og lære sjølv, seier Nygaard.
Empati for robotar
Å arbeide med robotar gjer at mange vert knytt til maskinene.
– Det gjorde vondt å sjå at foten til Dyret knakk då noko ramla ned frå taket og landa på han. Eg har empati for den, seier Nygaard.
Han trekk fram at ein av grunnane til at robotforskarar vert knytte til maskinene er at dei er med på heile prosessen frå ide til 3D-skriving, byggesett og programmering av personlegdommen. Også for brukarane av sosiale robotar kan grensa mellom menneske og maskin vere vanskeleg å trekke.
– Ein robot kan bli ein ven, men eg er usikker på kor ekte det blir, seier han.
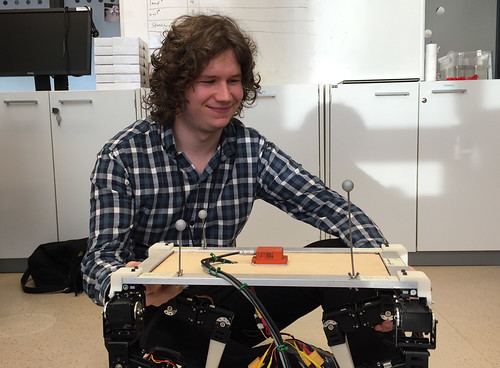
– Vi har det veldig gøy saman, og det er eit kreativt og bra forskingsmiljø, fortel Nygaard, her på golvet saman med Dyret.
Kva ser Dyret?
Om robotane er vener eller fiendar kan vere vanskeleg å avgjere, særleg sidan AI-ane ikkje så enkelt kan fortelle oss menneske korleis dei ser verda rundt seg. Fram til no har resultata frå Dyret blitt representert ved grafar og statistikk, men ein av masterstudentane arbeider med eit oppsett for å kople sensorane på Dyret til VR-briller.
– Målet er at vi skal sjå verda slik som Dyret ser den, avsluttar Nygaard.
Faktaboks
Namn: Tønnes Nygaard, 26 år
Stilling: PhD-stipendiat i evolusjonær robotikk, IFI, UiO
Dings: Den kunstig intelligente roboten Dyret
Forskingsprosjekt: Korleis lære ein AI å gå, ein del av EPEC (Engineering Predictability with Embodied Cognition), leia av Jim Tørresen.





